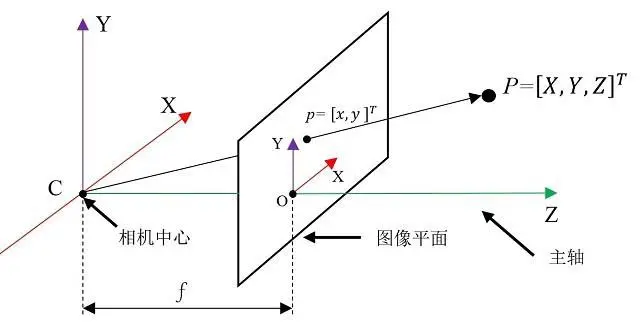
相机模型中,一般包含有三个坐标系: 世界坐标系 PwP_wPw,相机坐标系 PcP_cPc 和像素坐标系 PxP_xPx。相机内参 (Camera Intrinsics) 用于将相机坐标系转换至像素坐标系,相机外参 (Camera extrinsics) 用于将世界坐标系转换至相机坐标系。
总体来说,相机深度Zc×像素坐标Px=相机内参K×相机外参RT×世界坐标Pw相机深度 Z_c \times 像素坐标 P_x = 相机内参 K \times 相机外参 RT \times 世界坐标 P_w相机深度Zc×像素坐标Px=相机内参K×相机外参RT×世界坐标Pw